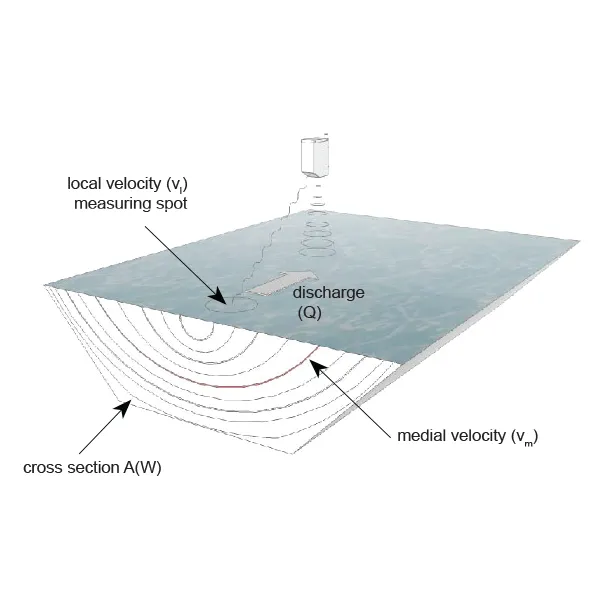
The RG-30 is an innovative radar technology for measuring the surface flow velocity of rivers, streams, and channels. The system is installed outside the water and measures without direct contact with the same. Hence, it requires no maintenance and works reliably even during high flow, floodings, or despite debris, driftwood, or high turbidity.
The device consists of a transmitter and a receiver unit, both mounted on separate masts. The transmitter emits signal pulses with a frequency of 1 MHz (10 Hz) which are reflected by hydrodynamic objects in the river bed. The received signal is then processed by a signal processor and converted into an electrical pulse which represents the distance traveled by the radar wave between transmitter and receiver. The more waves hit obstacles on their way from transmitter to receiver and vice versa, the higher is their number per unit time at output of signal processor. This corresponds with higher water velocity at this location.
Advantages
Portable mobile measuring system
No threat from debris or driftwood
Easy operator controls and handling
The measurement principle of the RG-30 is based on radar Doppler principle. An ultrasonic pulse is emitted from a transducer in front of the antenna and reflected by targets in range of interest. The reflected signal is received by another transducer at the backside of the antenna where it is amplified and digitized by a high speed data acquisition unit. The Doppler shift between transmitted signal and received signal corresponds to target velocity determined by processing algorithms inside the digital signal processor (DSP).
In order to achieve optimal accuracy and precision, the RG-30 uses advanced DSP technology with a sampling rate up to 2 MHz per carrier frequency channel (4 MHz for dual polarization channels). The measurement range can be extended up to 100 m downstream due to advanced digital signal processing algorithms which compensate for delays caused by
The system uses a pair of antennas (transmitter and receiver) to measure the free space between them by means of radar signals with different wavelengths. The transmitter is placed at a distance from the receiver along an axis perpendicular to the flow direction of interest. A pulse is sent from transmitter to receiver by means of transmission antenna A1 and reflected back from receiver R1 when it meets obstacles in its path. At this point, an ultrasonic signal (frequency 20 kHz) is transmitted from transmitter T1 to receiver R2 on another axis perpendicular to that of the A1-R1 axis. This signal reflects back from receiver R2 when it meets obstacles in its path and returns to transducer T2 which converts it into an electric pulse that is recorded on a PC using a sound card interface (Maxel Pro).